implementación de PID sobre Arduino para Quadcópteros
PID son las siglas para (Proporcional, Integral, Derivativo) Estos tres parámetros son usados para el algoritmo de cálculo del controlador
Leer más
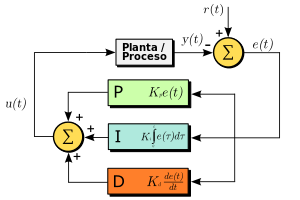
PID son las siglas para (Proporcional, Integral, Derivativo) Estos tres parámetros son usados para el algoritmo de cálculo del controlador
Leer másUn cuadricóptero es quizás el tipo de drone más famoso entre los aficionados, es un helicóptero multi-rotor con cuatro brazos, los
Leer másExisten muchos proyectos de controladores de vuelo para Arduino. Estos son de los más conocidos: AeroQuad: Funciona en otros tipos
Leer másChasis o marco: Es el esqueleto del multirotor, es la estructura que le da la forma y en donde todas
Leer más