implementación de PID sobre Arduino para Quadcópteros
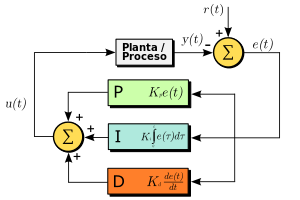
PID son las siglas para (Proporcional, Integral, Derivativo)
Estos tres parámetros son usados para el algoritmo de cálculo del controlador PID. Un controlador PID es un mecanismo de control que calcula la desviación o error entre un valor medido y el valor que se quiere obtener para aplicar una acción correctora.
Se usa el PID para tomar los datos de los sensores de la placa, compararlos con los valores esperados para aumentar o reducir la velocidad de cada uno de los motores y estabilizar el drone.
Ejemplos de implementación con arduino
https://github.com/elchals/Dron-Pepito-arduino-quadcopter.
Ampliación de la documentación:
http://brettbeauregard.com/blog/wp-content/uploads/2012/07/Gu%C3%ADa-de-uso-PID-para-Arduino.pdf